

咨詢電話:
13914007899

智能機械手輔助裝置相對于傳統吊升設備
來源:Chinese website 發布時間:2020年09月03日
智能機械手輔助裝置相對于傳統吊升設備
Tags:
以電子控制為特征的工業機械手INDEVA®(智能輔助裝置)Liftronic®系列
相對于
以氣動控制為特征的傳統吊升設備和氣動機械手
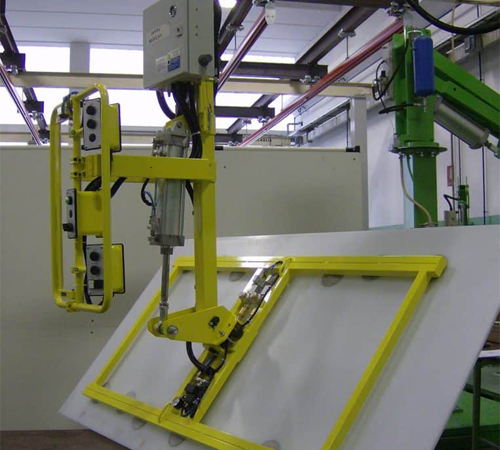
工業機械手Liftronic®系列(更好地稱為INDEVA®)(智能搬運裝置)屬于全球通稱為“智能輔助裝置(IAD)”類型的機械手。與傳統氣動機械手相比,它在人體工效、安全和產能方面具有顯著的優點。
自動重量感應和自動裝載物重量平衡。
通過采用基于微處理器的電子裝置,系統實現了裝載物重量的自動和瞬時平衡;它不僅僅自動平衡裝載物重量(自動平衡功能),而且它還持續感應并平衡裝載物重量(自動重量感應功能)。由于這一功能,操作員可以搬運那些會在搬運過程中改變重量的裝載物(例如,倒空或裝填時的鼓狀物、箱子、袋子等)或者尺寸和重量不同的裝載物,而無需中斷其搬運操作去用按鈕或壓力調節器調整負載設置或選擇不同的預設參數。
操作員可采用一種自然而直觀的方式來搬運裝載物,幾乎忘記自己是在使用一臺機器。
傳統的氣動控制機械手(包括那些被描述為自動平衡的機械手),在吊升裝載物時平衡裝載物的重量,但并不自動且持續地感應裝載物重量,并且不會隨著重量改變而自動調整平衡;
對重平衡要慢得多,因為與電子信號相比,氣動信號行經整個回路所花的時間要長很多。
裝載物放置的高精度。
由于速度和精度比傳統氣動機械手明顯更高,因此INDEVA®能夠達到的高精度,令操作員能夠以適合于任務的進度直觀地進行工作。操作員只需輕輕的觸碰便可實現控制。
INDEVA®工業機械手與氣動工業機械手的區別在于,不會超程、不會反彈,而且不需要作大量細微校正動作來到達要求的位置。
浮動模式功能(手觸按裝載物)能夠讓操作員執行準確放置任務時用手觸按裝載物而無需使用手柄或按鈕;尤其是把裝載物放在一個有限區域內的情況下,或者對于一些因氣動控制式機械手的反彈而可能會受影響的精細裝載物,這種模式非常有用。
人體工效和省力的裝載物搬運
Indeva Liftronic系列工業機械手,具有借助于力量感應手柄的指尖控制模式,可對操作員的上下移動作出迅即的響應。這樣大大減少了啟動、加速和減速的慣性力,從而能讓系統像操作員的手臂延伸一樣進行操作。操作員要沿Z軸移動,需要用的力量是不變的而且幾乎為零;這一功能,加上其人體工效的設計,使得INDEVA成為適用的物料搬運解決方案,它做到了符合在手工裝載物搬運的人體工效嚴格的規定和指令。
快速移動
INDEVA®工業機械手對人的觸碰作出迅速而流暢的響應,克服了加速與剎車二個過程中的慣性,將操作員的移動放大。操作員注意到,在機器感應與其響應之間沒有時間差,這在氣動控制式機械手的情況下是不可能實現的。
更大的可視性和便利的可操作性
用于INDEVA®工業機械手的吊升工具與用于傳統機械手的吊升工具相比,重量輕得多,而且更加小巧,能獲得更大的可視性和便利的可操作性。
多功能
INDEVA®工業機械手Liftronic® Easy系列可配備有一個抓取工具快速聯接裝置,借助于這個裝置,便可以快速而方便地更換不同的末端效應器和搬運不同類型的裝載物,而只需中斷工作15秒鐘。
通過電子軟件,很容易對裝載物搬運參數或末端效應器功能進行修改(和變更氣動機械手的氣動回路相比,操作要簡單得多)。
在具備多種功能的特制末端效應器的情況下,這一點尤其重要。
我們憑借模塊化抓取工具理念“MODULO”和微處理器可編程邏輯,使得Liftronic®系列機械手成為一項獨特的裝載物搬運解決方案,能夠與各種工業領域的需求相匹配。
更高的產能
采用INDEVA,可在整個班次中保持輸出,從而提高產能,更有利于操作員的身體健康。
針對工業4.0的無線連接
INDEVA®可以通過公司網絡與客戶的IT系統交換數據,并且能夠借助界面軟件實現機械手活動的可視化。
遠程故障排除
可以通過Wi-Fi將INDEVA®連接到Indeva手機App,這樣可以實時地將機器數據傳輸到遠程平板電腦或智能手機。這可以為故障診斷提供輔助,從而明顯減少上門服務費用和操作者的停工時間。
環境友好
由于有效而低能耗,因而達到低碳排放。
布雷西亞大學工程系最近進行了一項案例研究,該項研究已經由《國際工業人體工效學雜志》出版,加上米蘭大學進行的一項比較研究,二者證明了如何通過采用INDEVA®來滿足行業當前對增加產能與改良人體工效相結合的需求。
對于在搬運速度、流暢移動和準確的重物放置有要求的應用來說,INDEVAs- Liftronic®系列提供了解決方案
【相關文章】


最新資訊
關于電動智能平衡吊
2024-12-16電動智能平衡吊是一種用于提升和搬運重物的設備,它結合了電動驅動技術和智能控制系統,能夠實現貨物的平穩、精 確搬運。這種設備廣泛應用于工廠、倉庫、碼頭等場合,特別適合于需要頻繁起吊和精 確定位的作業環境。以下是關于電動智能平衡吊的一些關鍵信息:
助力機械手的使用培訓如何?
2024-12-16助力機械手的使用培訓是確保操作人員能夠正確、安全、高效地使用設備的關鍵步驟。以下是一些詳細的培訓內容和方法,幫助你制定有效的培訓計劃:
助力機械手的維修保養如何?
2024-12-09助力機械手的使用方法和注意事項有哪些?
2024-12-09助力機械手的使用方法和注意事項對于確保其正常運行、提高工作效率和保障操作人員的安全至關重要。以下是一些關鍵的使用方法和注意事項:
助力機械手如何實現自動化?
2024-12-02實現助力機械手的自動化是一個涉及多個技術和系統的綜合過程,主要包括機械設計、控制系統、傳感器技術、通信協議和軟件編程等方面。以下是一些關鍵步驟和注意事項,幫助你實現助力機械手的自動化:
助力機械手如何集成到自動化生產線中?
2024-12-02將助力機械手集成到自動化生產線中是一個復雜的過程,需要綜合考慮機械手的設計、控制系統、通信協議、安全措施等多個方面。以下是一些關鍵步驟和注意事項,幫助你順利完成這一過程:
機械手的防冷凝措施有哪些?
2024-11-25機械手在低溫環境中工作時,冷凝水的形成可能會導致電氣部件受潮短路、機械部件生銹等問題,因此采取有效的防冷凝措施非常重要。以下是一些常用的防冷凝措施:
機械手在低溫環境下如何工作?
2024-11-25機械手在低溫環境下的工作需要特別考慮材料選擇、潤滑、加熱系統和控制系統等多個方面,以確保其在極端低溫條件下仍能正常運行。以下是一些關鍵措施和注意事項:
如何設計機械手的運動范圍?
2024-11-18設計機械手的運動范圍是一個涉及多個方面的復雜過程,需要綜合考慮機械手的應用需求、工作環境、結構設計和動力學等因素。以下是一些關鍵步驟和注意事項,幫助你設計出合適的機械手運動范圍:


